

























































-
 在现代化工业生产中,冷凝器作为各类制冷设备的关键组件,通常用于冷却设备或系统中,起到冷却和凝结气体的作用,其生产效率和质量直接影响着整个产业链的运行效能。播放125
在现代化工业生产中,冷凝器作为各类制冷设备的关键组件,通常用于冷却设备或系统中,起到冷却和凝结气体的作用,其生产效率和质量直接影响着整个产业链的运行效能。播放125 -
 随着科技的不断发展,机器人技术不断革新,并逐渐渗透到各行业的各个环节。在机器人技术的帮助下,各行业的生产力不断增强,生产效率也得到了极大的提高。播放131
随着科技的不断发展,机器人技术不断革新,并逐渐渗透到各行业的各个环节。在机器人技术的帮助下,各行业的生产力不断增强,生产效率也得到了极大的提高。播放131 -
 进入2024年,众多前景广阔的技术和用例已蓄势待发,准备迎接增长的浪潮。随着2023年的落幕,展望未来12个月,机器人行业将会呈现何种趋势?以下是我们认为将在2024年引领潮流的五个机器人趋势。播放174
进入2024年,众多前景广阔的技术和用例已蓄势待发,准备迎接增长的浪潮。随着2023年的落幕,展望未来12个月,机器人行业将会呈现何种趋势?以下是我们认为将在2024年引领潮流的五个机器人趋势。播放174 -
 近年来,机器人技术日新月异,为各行各业的发展注入了新的活力。制造业作为一项工作内容重复、劳作时间长的产业,对自动化改造需求最为迫切,因此,也是机器人技术渗透最早、渗透面的产业。播放174
近年来,机器人技术日新月异,为各行各业的发展注入了新的活力。制造业作为一项工作内容重复、劳作时间长的产业,对自动化改造需求最为迫切,因此,也是机器人技术渗透最早、渗透面的产业。播放174 -
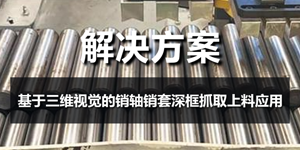
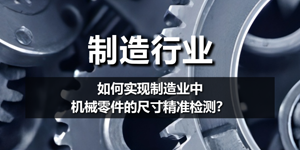 随着市场竞争日益激烈,制造业对产品质量的要求不断提升。质检对于制造业来说是一个非常重要的环节,传统的检测方法包括人工视觉检测以及传统机器人视觉检测,在一些复杂零件的尺寸检测中,容易存在检测结果不统一、漏检、精度不足、成本高昂等问题。播放182
随着市场竞争日益激烈,制造业对产品质量的要求不断提升。质检对于制造业来说是一个非常重要的环节,传统的检测方法包括人工视觉检测以及传统机器人视觉检测,在一些复杂零件的尺寸检测中,容易存在检测结果不统一、漏检、精度不足、成本高昂等问题。播放182 -
 当下,建筑业正迅速融入数字科技的潮流,迎接着一场深刻的变革。科技的飞速发展,使得建筑业不再局限于传统的施工方式,而是朝着数字化、智能化的方向不断迈进。播放176
当下,建筑业正迅速融入数字科技的潮流,迎接着一场深刻的变革。科技的飞速发展,使得建筑业不再局限于传统的施工方式,而是朝着数字化、智能化的方向不断迈进。播放176 -
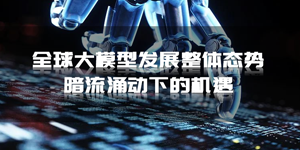
 随着人工智能技术的不断发展,大模型已经成为该领域的一个重要趋势。大模型是指参数量巨大的深度学习模型,具有强大的计算能力和学习性能,可以处理更加复杂的数据和任务本文将介绍大模型的发展现状,包括以下几个方面播放236
随着人工智能技术的不断发展,大模型已经成为该领域的一个重要趋势。大模型是指参数量巨大的深度学习模型,具有强大的计算能力和学习性能,可以处理更加复杂的数据和任务本文将介绍大模型的发展现状,包括以下几个方面播放236 -
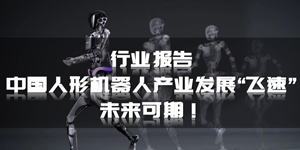 中国人形机器人行业在全球范围内取得了显著的进步,中国作为全球最大的制造业基地,对人形机器人的需求日益增长,尽管起步较晚,但在政策支持和技术创新的推动下,中国人形机器人行业发展迅速。播放198
中国人形机器人行业在全球范围内取得了显著的进步,中国作为全球最大的制造业基地,对人形机器人的需求日益增长,尽管起步较晚,但在政策支持和技术创新的推动下,中国人形机器人行业发展迅速。播放198 -
 人工智能大模型,是指通过在海量数据上依托强大算力资源进行训练后能完成大量不同下游任务的模型。在技术层面上,大模型的实现采用“预训练+指令微调+人类反馈的强化学习”的训练范式。播放173
人工智能大模型,是指通过在海量数据上依托强大算力资源进行训练后能完成大量不同下游任务的模型。在技术层面上,大模型的实现采用“预训练+指令微调+人类反馈的强化学习”的训练范式。播放173 -

马斯克“赛博皮卡”Cybertruck交付!43万起售,性能强如猛兽
早在2019年的时候,马斯克就曾公开发布特斯拉旗下第一辆电动皮卡Cybertruck,一晃4年过去了,在经历了数次跳票后,Cybertruck终于开始交付了!马斯克总结了Cybertruck三大能力:超硬结构、超强拖拽、超快加速。播放178 -
 在一篇新论文中,来自Adobe研究院和澳大利亚国立大学的研究团队介绍了一种创新的大型重建模型(LRM)。这个开创性的模型具有非凡的能力,可以在短短5秒内从单个输入图像中预测物体的3D模型。播放226
在一篇新论文中,来自Adobe研究院和澳大利亚国立大学的研究团队介绍了一种创新的大型重建模型(LRM)。这个开创性的模型具有非凡的能力,可以在短短5秒内从单个输入图像中预测物体的3D模型。播放226

BFT机器人公众号
关注有惊喜
获取最新动态